Using ROS2 for Linux
Robot Operating System (ROS) provides libraries and tools to help software developers create robot applications. It provides hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more. This document shows how to install arena_camera, LUCID’s ROS2 driver.
System Requirements
- Ubuntu 18.04
- ROS2 Eloquent for Ubuntu 18.04
- Arena SDK for Linux x64 v0.1.43 or higher
- Dependencies: g++, make, python3, pip
- Driver file: arena_camera_ros2 found at https://github.com/lucidvisionlabs/arena_camera_ros2/releases/
Arena SDK Setup
Download and install Arena SDK. Arena SDK for Linux is available on the Downloads page at https://thinklucid.com/downloads-hub/. The Arena SDK dependencies are listed in the README file included with the SDK.
Set up your ARENA_ROOT environment variable. This environment variable should be the path where you have installed Arena SDK.
$ echo "export ARENA_ROOT=~/ArenaSDK_Linux_x64" >> ~/.bashrc$ source ~/.bashrc
You can confirm the variable is set with the typing echo $ARENA_ROOT in the terminal.

Initial ROS2 Setup
After installing Arena SDK, review our Getting Started steps discussed in the Arena SDK documentation and run the Arena_SDK.conf file in the Arena_SDK directory:  Installing ROS2 involves extracting the arena_camera ROS2 tarball and running our initial setup script:
Installing ROS2 involves extracting the arena_camera ROS2 tarball and running our initial setup script:
$ tar -xvf arena_camera_ros2-1.1.tar.gz -C ~
$ cd ~/arena_camera_ros2-1.1
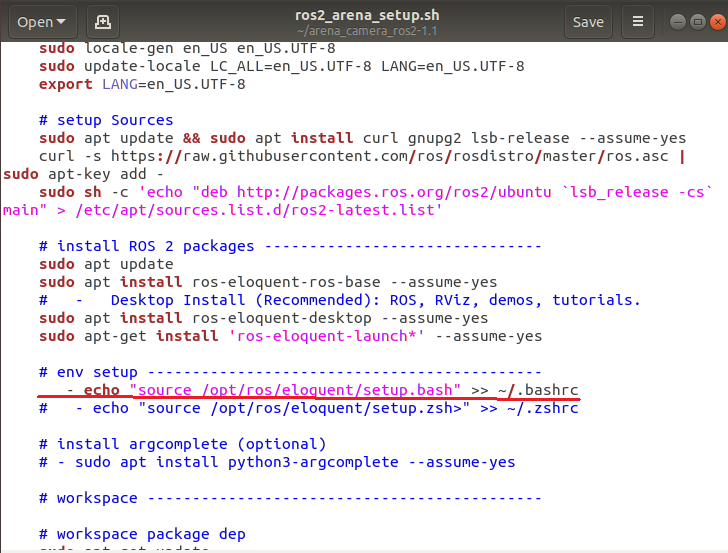
$ `cat arena_camera_ros2\ros2_arena_setup.sh` to view the scriptUncomment `echo “source /opt/ros/eloquent/setup.bash” >> ~/.bashrc` if using a regular terminal:
install ROS2 Eloquent distro:
$ cd arena_camera_ros2-1.1 ; sudo sh ros2_arena_setup.sh
Building and Running the arena_camera ROS Driver
Installing dependency colcon:
$ sudo apt update$ sudo apt install python3-colcon-common-extensions
$ echo "source /opt/ros/eloquent/setup.bash" >> ~/.bashrc
$ echo "source /opt/ros/eloquent/setup.zsh" >> ~/.zshrc
$ source ~/.bashrc
$ sudo apt-get install python-rosdep
$ sudo rosdep init
$ rosdep update*If rosdep initialization fails:
$ sudo apt install python3-catkin-lint python3-pip
$ pip3 install osrf-pycommon
$ sudo rosdep init
$ sudo rosdep update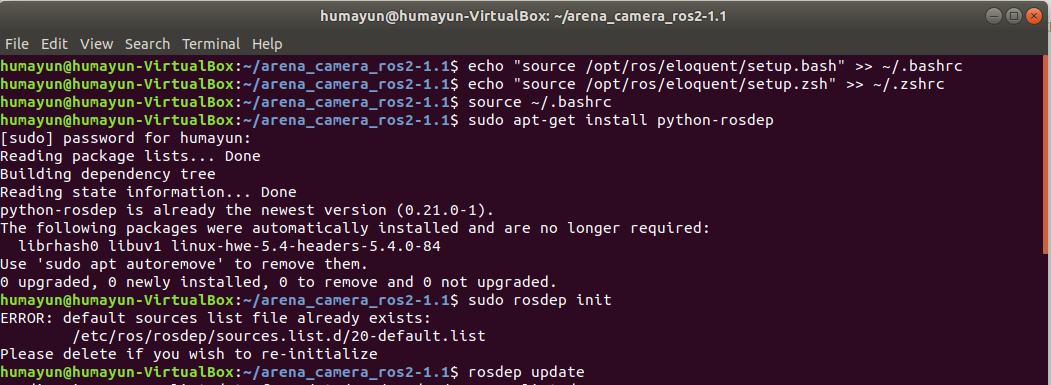
Copy the included image_encoding.h to your ROS include folder
$ sudo cp /opt/ros/eloquent/include/sensor_msgs/image_encodings.h /opt/ros/eloquent/include/sensor_msgs/image_encodings.h.bak$ sudo cp inc/image_encodings.h /opt/ros/eloquent/include/sensor_msgs/image_encodings.h
Build the ROS2 Workspace:
$ cd ~arena_camera_ros2-1.1/ros2_ws
$ rosdep install --from-paths src --ignore-src -r -y
$ colcon build --symlink-install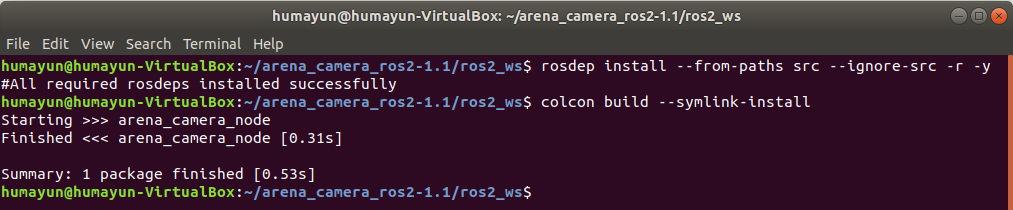
*If a Cmake version error is shown:
$ sudo apt-get update
$ sudo apt-get install apt-transport-https ca-certificates gnupg software-properties-common wget
$ wget -O - https://apt.kitware.com/keys/kitware-archive-latest.asc 2>/dev/null | sudo apt-key add -
$ sudo apt-add-repository 'deb https://apt.kitware.com/ubuntu/ bionic main'
$ sudo apt-get update
$ sudo apt-get install cmake
$ colcon build --symlink-installInstall the build (below would be running from the ros2_ws folder):
$ . install/setup.bash After installing the build, you will find two ROS2 if you run the command ros2 pkg executables |
grep arena in the terminal. The two executables would be start and trigger_image.

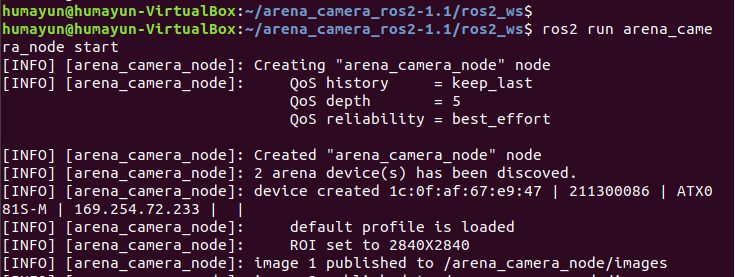
To run arena_camera_node:
$ ros2 run arena_camera_node startThe above will start arena_camera_node and by default outputs images to the topic /arena_camera_node/images.
To start a camera in trigger mode and trigger and image:
$ ros2 run arena_camera_node start --ros-args -p exposure_time:=1000.0 -p
trigger_mode:=true
ros2 run arena_camera_node trigger_imageYou will also find the command to look at the captured images using ros2 run image_tools
showimage -t /arena_camera_node/images. By default we are publishing the images
to /arena_camera_node/images