Precision Time Protocol (PTP) is a protocol used to synchronize clocks throughout a computer network. This protocol is defined in the IEEE 1588-2008 standard (known as “PTP V2”), which has been integrated into the GigE Vision standard.
For machine vision cameras, this protocol enables multiple cameras to share a common clock that can in turn be used to precisely trigger machine vision cameras and peripherals such as strobe lighting upon the occurrence of a software event. An additional benefit of this protocol is that timestamp produced by the cameras will share a common clock reference. If an external grandmaster clock is used, the timestamp can be linked to real-world clock.
LUCID cameras support the End-to-End method of measuring latency in PTP, but not the Peer-to-Peer method.
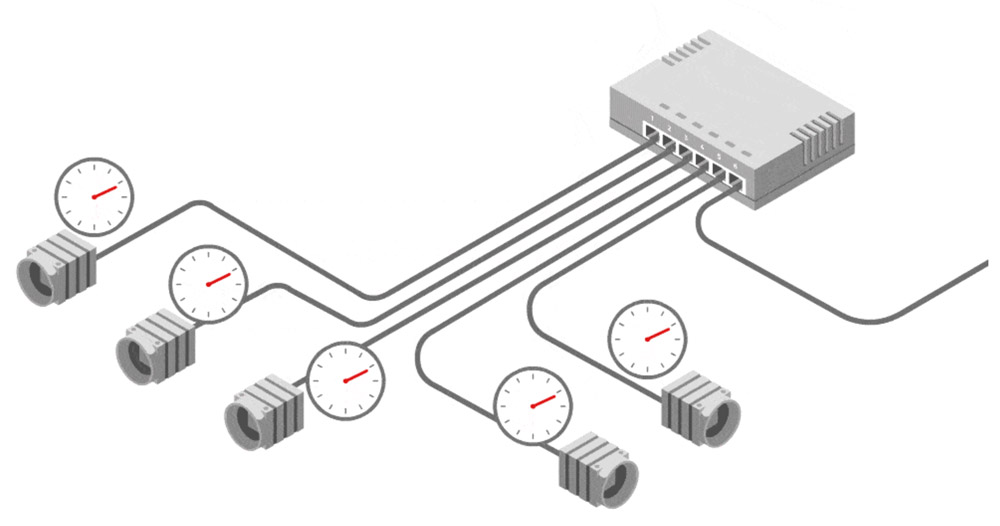
To use PTP, cameras must be on the same network. This can be achieved using a network bridge or a switch. When you use a switch, bandwidth sharing may be required.
When PTP is enabled on LUCID cameras, they are able to organize themselves into one master clock and one or more slave clocks using PTP’s Best Master Clock (BMC) algorithm. You can also set which cameras will be slaves under the PTP Control node. This node contains other relevant nodes for PTP.
Examples of the ways in which PTP is useful:
- Use one camera as the PTP master and have the other cameras synchronize their clocks to the master.
- Use an external PTP grandmaster, and trigger the cameras using a hardware trigger.
- Use the Scheduled Action Commands feature, which enable images to be captured at a predetermined time. This feature is considered a software trigger.
- Use the PTP Sync feature to enable the synchronization of multi-camera setups to prevent reduced framerate due to packet collisions.
LUCID’s PTP Sync feature allows cameras to automatically synchronize their frame rates over PTP. This article shows several ways to synchronize Triton and Helios2 cameras to add color to the Helios color output including synchronization using PTP Sync. Note that with PTP Sync, you lose the ability to trigger cameras.